

About me
Halo, I’m Ran Zhang!
I'm currently a Lead Graphics AI Researcher at Tencent Video AI Center in New York, working on AIGC for films, animations and 3D contents.
Previously I was a postdoctoral researcher
in Human Computer
Interaction Lab at Hasso Plattner Institute,
working with Prof.
Patrick Baudisch.
I got my PhD from IST Austria in 2020, supervised by Prof. Bernd
Bickel, and supported by MSCA-ITN
DISTRO
project.
Previously, I got my Master degree from the University of Science and
Technology of China(USTC) in 2014, supervised by Prof. Xuejin
Chen and Prof. Ligang
Liu; and a Bachelor degree from Tianjin University
in 2011.
My current research interests include AI + filmmaking, Neural rendering,
Implicit content creation and
Generative media, including images, videos and 3D contents.
If you are interested, please check my recent
publications.
Experience
Lead Graphics AI Researcher

New York, USA
Senior Graphics Researcher
New York, USA
Postdoctoral Researcher
The Human Computer Interaction Lab
Berlin, Germany
Co-founder and Tech Lead
Shenzhen, China
Postdoctoral Researcher
Bickel's Group
Vienna, Austria
Research Assistant (PhD student)
Bickel's Group
Vienna, Austria
Research Intern
Internet Graphics Group
Beijing, China
Visiting Student
Smart Geometry Processing Group
London, UK
Visiting Student
The Digital Reality Group
London, UK
Research Assistant (Master student)
Dept. Electronic Engineering and Information Science
Hefei, China
Research Intern
Internet Graphics Group
Beijing, China
Projects

Academic blog: GraphiCon
State of the art technologies of Computer graphics. Interesting graphics papers.

GraphiCon
- Since:
- 12 Mar 2017
- Site link:
- https://zhuanlan.zhihu.com/graphicon
GraphiCon is an UGC media focus on computer graphics, it is founded by several graphics researchers. Currently it is hosted on Zhihu and Wechat official account platform.

GAMES Webinar
Weekly computer graphics webinar
GAMES Webinar
- Since:
- 22 Jun 2017
- Site link:
- www.games-cn.org
GAMES stands for Graphics And Mixed Environment Seminar, aims at spreading computer graphics techniques and assisting young graphics researchers.
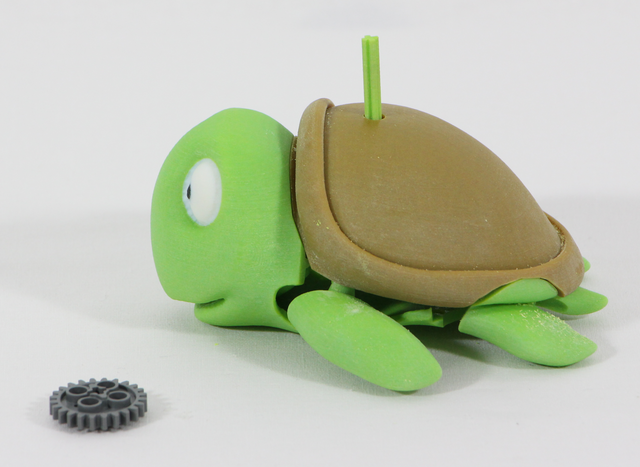
Computational design of functionalities
Algorithm assisted design for 3d printable objects with functionalities.

Computational design of functionalities
- Date:
- Jul 2017
- Site link:
- http://visualcomputing.ist.ac.at/publications/2017/MechRet/
In our SIGGRAPH 2017 paper: Functionality-aware Retargeting of Mechanisms to 3D Shapes, We present an interactive design system to create functional mechanical objects. Our computational approach allows novice users to retarget an existing mechanical template to a user-specified input shape.
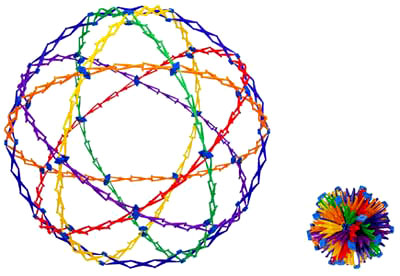
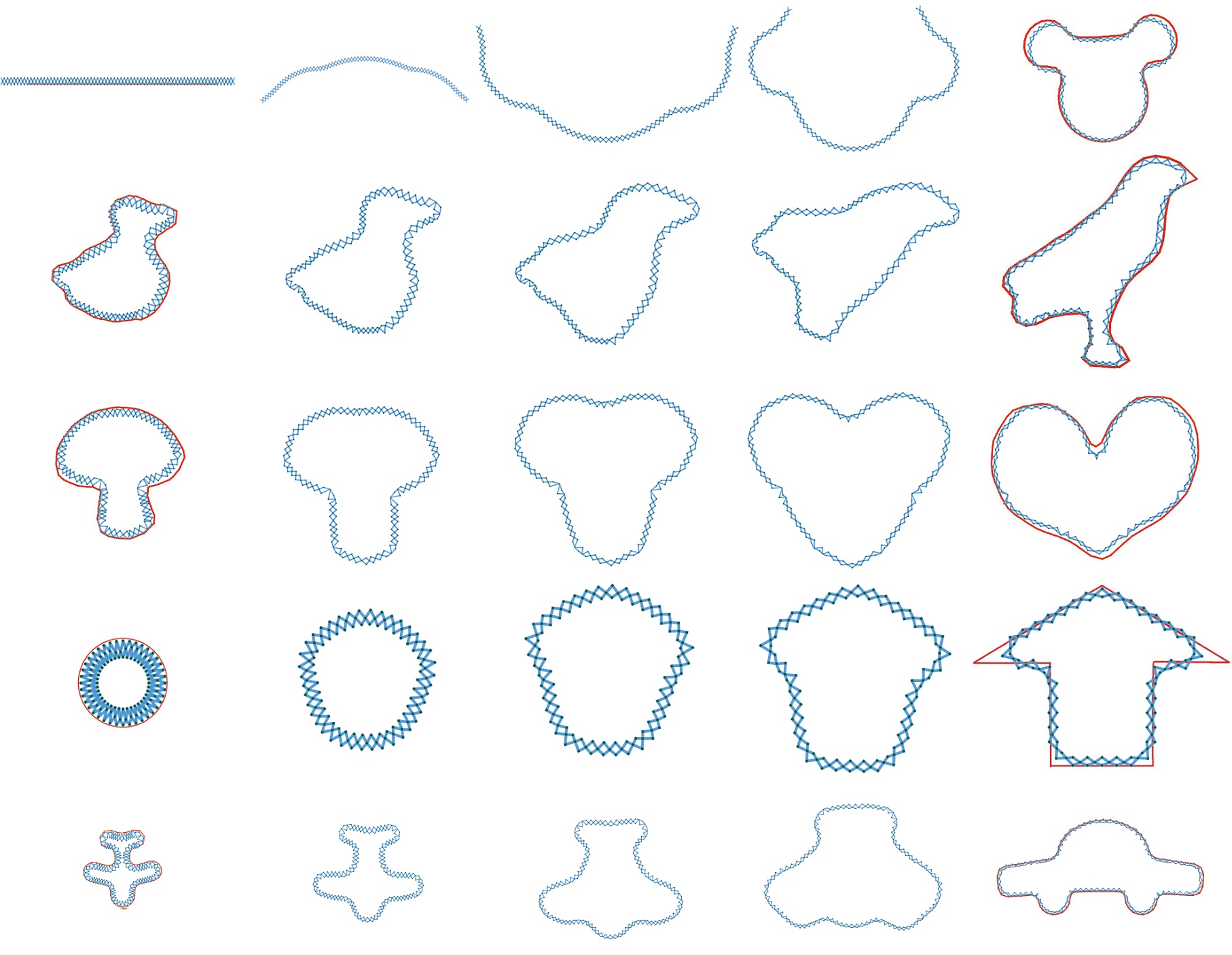
Deployable structures
Structures that can be compressed and deployed into certain shapes.
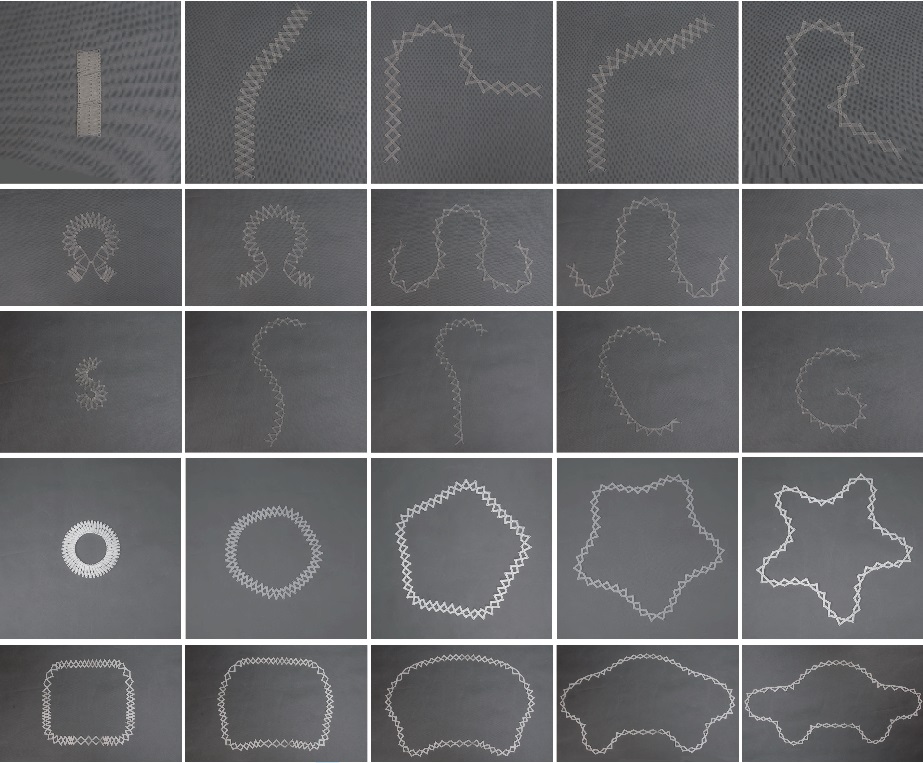

Deployable structures
- Date:
- Jan 2016
- Site link:
- http://staff.ustc.edu.cn/~xjchen99/scissor.html
Scissor structures are used to generate deployable objects for space-saving in a variety of applications, from architecture to aerospace science. While deployment from a small, regular shape to a larger one is easy to design, we focus on a more challenging task: designing a planar scissor structure that deploys from a given source shape into a specific target shape. We propose a two-step constructive method to generate a scissor structure from a high-dimensional parameter space. Topology construction of the scissor structure is first performed to approximate the two given shapes, as well as to guarantee the deployment. Then the geometry of the scissor structure is optimized in order to minimize the connection deflections and maximize the shape approximation. With the optimized parameters, the deployment can be simulated by controlling an anchor scissor unit. Physical deployable objects are fabricated according to the designed scissor structures by using 3D printing or manual assembly.

BrickMe Studio
BrickMe Studio is the world's first AI-assisted system for generating brick assemblies from a single portrait.
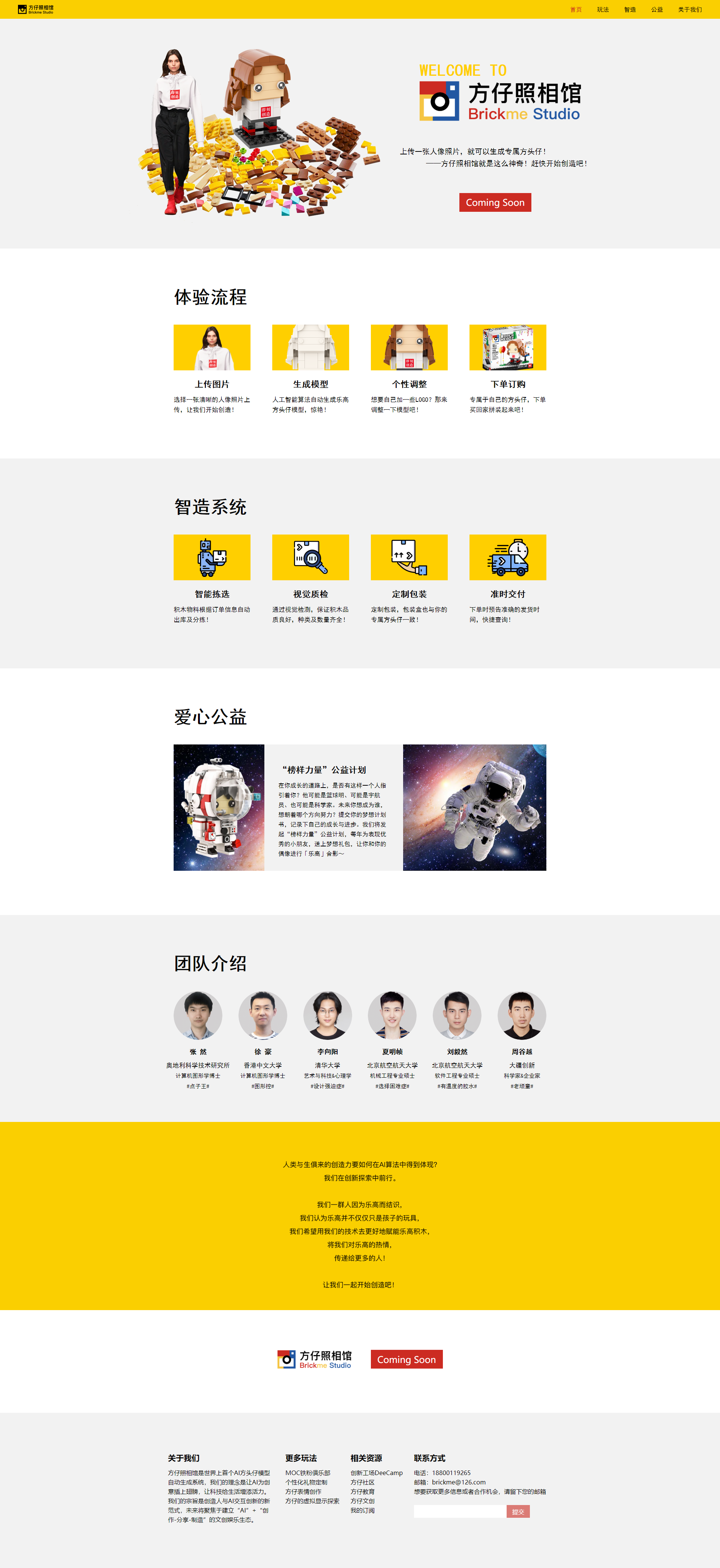
BrickMe Studio
- Since:
- June 2020
- Site link:
- https://brickme.deecamp.com
BrickMe Studio is the world's first AI-assisted system for generating brick assemblies from a single portrait.